Самовывоз с отделения связи (Нова пошта, УКРПОШТА)Отправим сегодня до 18:00
Доставка куръером (Нова пошта)Отправим сегодня до 18:00
Оплата
Оплата при получении товара, Google Pay, Картой онлайн, Безналичными для юридических лиц, Безналичный для физических лиц, Visa, Mastercard, Apple Pay
Гарантия
12 месяцев официальной гарантии от производителя. Обмен/возврат товара в течение 14 дней
Общее описание
Регулятор скорости предназначен для использования в электрических скейтбордах, электровелосипедах, скутерах, робототехнике, а также радиоуправляемых авиамоделях.
Регулятор поддерживает управление двигателями постоянного тока, BLDC и FOC, а также совместим с двигателями, оснащенными датчиками Холла.
Flipsky FSESC6.7 предлагает гибкие варианты управления.
После настройки с помощью VESC Tool работает на основе выбранного режима управления:
Режим управления током. Ток двигателя контролируется входным сигналом. Этот режим обеспечивает прямое управление крутящим моментом;
Режим управления рабочим циклом. Напряжение двигателя контролируется входным сигналом в процентах от напряжения аккумулятора. Это базовый и распространённый метод управления;
Режим управления скоростью. Регулятор пытается поддерживать заданную скорость вращения двигателя на основе входного сигнала. Этот режим требует четких параметров двигателя и обратной связи от датчиков;
Режим управления положением. Для моделей, требующих точного позиционирования двигателя. Регулятор управляет двигателем для достижения и удержания определенного углового положения. Обычно для этого нужен энкодер.
Особенности:
Широкий диапазон входного напряжения;
Алюминиевый радиатор для охлаждения;
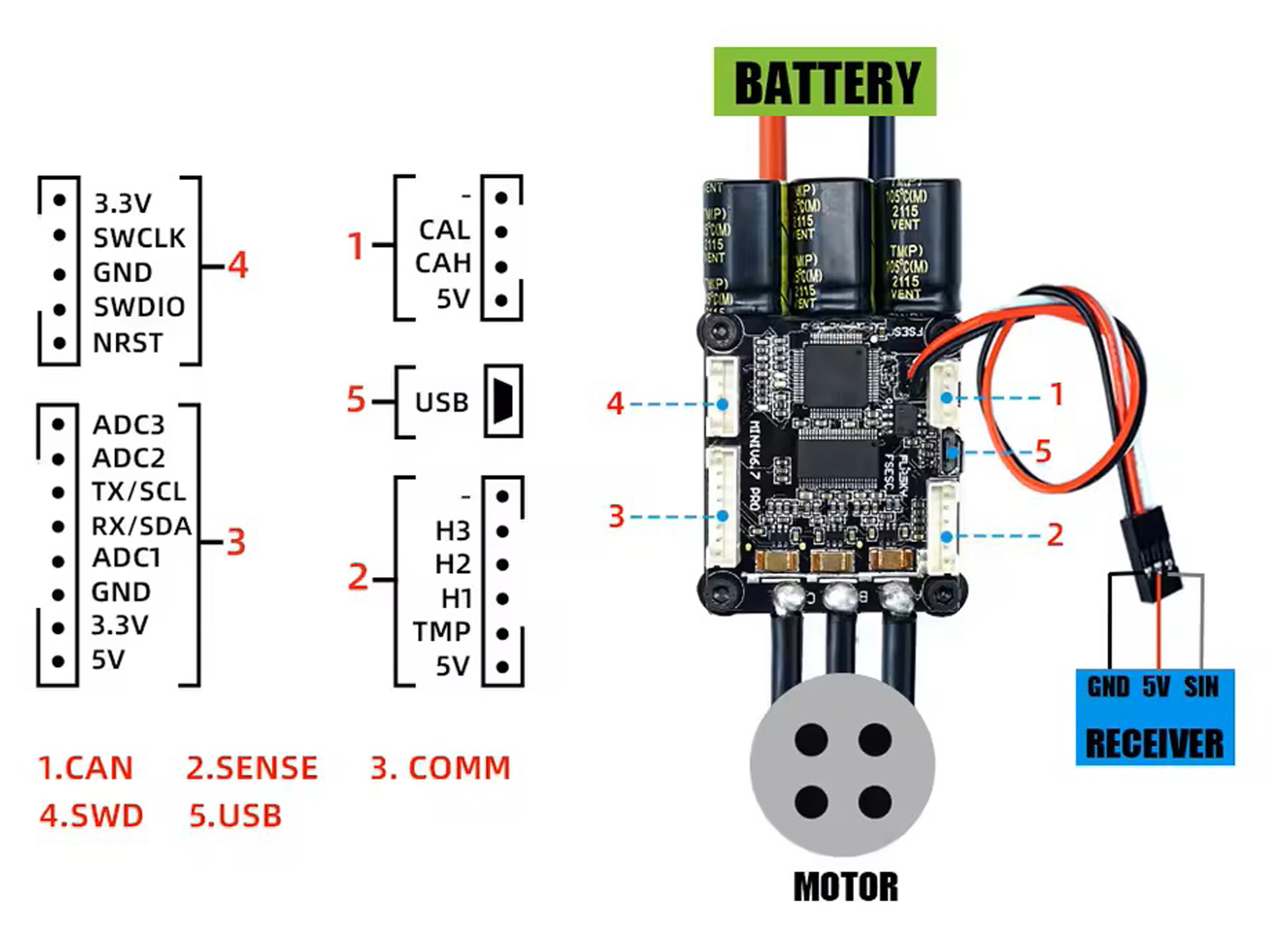
Поддержка функции стабилизации посредством подключения модуля IMU через интерфейс IIC;
Поддержка различных режимов управления и интерфейсов для подключения.
Технические характеристики:
Рабочее напряжение: 14-60В (4-13S Li-Po);
Максимальный постоянный ток: 70А;
Максимальный кратковременный ток: 200А;
BEC: 5В/1А;
Тип: бесколлекторный, бессенсорный;
Порты интерфейса управления и детекторов: USB, CAN, UART, SPI, ICC;